モータ制御技術
モータの制御には ベクトル制御、dq変換 などの理論を学習することから始めますが、ここでは必要な知識を直感的に理解し、短時間でモータを駆動できるようになること、を課題としています。
また、対象とするモータは市販されている一般的なDCブラシレスモータ、ACサーボモータなどで、特定の用途に特化した特殊なモータには当てはまりません。
■ブラシのないモータの原理
ブラシのあるDCモータは説明するまでもなく、モータを回転させるのに難しい手順は必要ありません
MTmate でもブラシ付DCモータを選択できます。 この場合取り扱いは非常に簡単で、このページの解説は不要です
ここではブラシのないモータについて説明します。
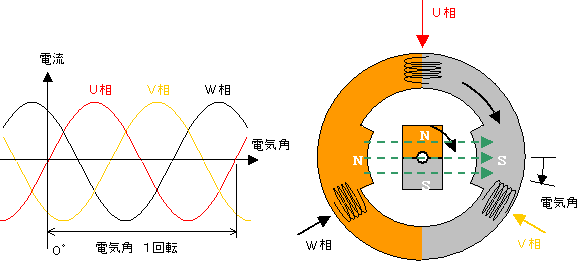
上の図で、外側の丸い磁石は実際にはありません。イメージです
UVW3相に MTmate から120°ずれた位相のsin波電流を流すことで丸い磁石と等価な磁界が発生します
sin波を進めることでこの磁界は回転し、図のイメージの外側の丸い磁石があたかも回転した様になります
これを回転磁界と呼びます。 もちろんコイル自体は固定されており回転しません
内側の棒磁石はモータの軸に取り付けられたマグネットです。 外側の磁石に反発と引き寄せられることで回転磁界と一緒に回転します
モータが力を発生するのはこの図のように外側の磁石と90°ずれた位置であることに注意してください
モータ軸のマグネットはこの図ではN極とS極が引き合った水平の位置で安定しますが、この位置は最も力の発生しない状態です
注意)簡単にするため2極のモータを例にしています
4極、8極のモータもありますが、この場合モータ軸の1回転は電気角の2回転、4回転相当で、極数に比例した回転数になります
■転流 と 電気角
DCブラシ付きモータを回転させる技術は非常に単純ですがDCブラシレスモータやACサーボモータは電圧を加えるだけでなくモータ軸の回転にあわせてUVW3相で回転磁界をつくる必要があります
このことを 転流 と呼びます。
また、回転磁界の角度を 電気角 と呼びますこの二つを理解してください
DCブラシ付きモータではセンサは必ずしも必要ありませんが、ブラシ無しのモータでは軸に取り付けられたマグネットの位置を知るために必ずエンコーダなどのセンサが必要となります
MTmate を使う上では3相のsin波を意識する必要はありません。 振幅と電気角の二つの値を使います
振幅でモータのトルクを、電気角で回転磁界の角度を指定します
電気角を決めるために接続したエンコーダやポールセンサからモータの回転位置情報が必要ですがこれも MTmate から送信されます
■電気角の原点
モータコントロールをプログラムする際に戸惑うのが電気角の極性と原点(0°)です
MTmate が規定する電気角は、
U相電流が0、 W相電流が+(コイルに電流が流れ込む方向)、 V相電流が-(コイルから本機に電流が流れ込む方向)の状態が 電気角 0°で、モータ軸のマグネットとは90°ずれています
モータに付いたエンコーダ等のセンサはモータ軸の角度を示しますが電気角ではありませんので注意して下さい
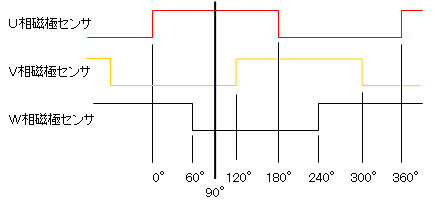
モータによっては磁極センサ(ポールセンサ)が付いているものがあります
磁極センサは常にモータ軸のマグネットの位置を示していますので電気角の原点をセットするのは容易です
下の図は磁極センサとマグネットの位置関係を示しています
60°ごとに信号が変化しますが、変化のエッジを捕捉することで正確に位置を合わせることができます
実際にはこのように調整されたモータとは限りません。 こうした場合でも簡単にそのズレを調べる方法があります。
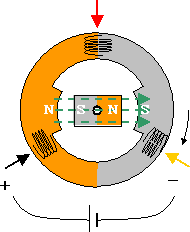
このページの冒頭で説明しました 「モータ軸のマグネットはN極とS極が引き合った水平の位置で安定しますが、この位置は最も力の発生しない状態です」 を利用します。
下の図の様にW相に+、V相に-電圧を加えて電流を流します。つまりU相の電流は 0 です。
モータの抵抗値を確認してモータの定格電流以上が流れないようにして下さい。
PCboy(下記参考をご覧ください)を使っている場合、速度の指定を 0rpm にすればこの状態です
これで安定したモータ軸は電気角で90°の位置です。 言い方を変えると、この位置が90°になるように電気角原点をセットすることになります
注意)マグネットの吸引力を利用する大型のIPMモータでは90°としないことがあります
しかしこうした磁極センサがついていないモータではエンコーダ情報からマグネットの位置を求める必要があります。
FA用のサーボモータの一部はエンコーダ情報をシリアルデータで返しますが、このデータの中にマグネットの位置情報が含まれていて磁極センサの付いたモータと同じく容易に電気角原点をセットできます。
MTmate では多摩川精機製TBLi-Ⅱシリーズがこのタイプになります。
またコントローラ KImaster は独自の方法でエンコーダの情報からマグネットの位置を求める機能を持っています
極性について注意が必要です。
U相がピークを向かえ→ V相がピークを向かえ→ W相がピークを向かえる 順番の電流による回転が +方向です
実際にモータ軸が回転する方向はモータコイルの巻き方向やUVWの配線により変わります
何れにしてもその回転方向が+方向となり、エンコーダをカウントした値も同じ方向で +方向に増加する必要があります
■参考
パソコンのアプリケーション PCboy を使うととモータの電気角原点と回転方向を間単に確認できます
PCboy は電気角を+あるいは-方向に強制的に回しますので モータの実際の回転方向で+、-方向がわかります
同時に接続したエンコーダの極性(増減方向)も確認できます
PCboy は MTmate に添付されています
マイコンボードArduino で動作するサンプルプログラムを提供しています
先ずは動かしてみることでこのページの説明がさらに理解いただけます